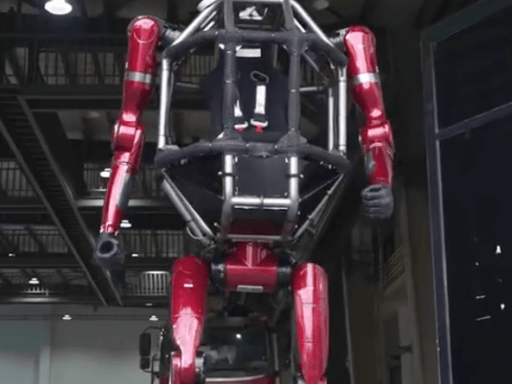
一、GD01:国产载人机甲的里程碑,重载与变形的双重突破
GD01是宇树科技深耕四足与人形机器人技术近十年的集大成之作,核心定位为“可载人、会变形、力量爆表”的民用载人机甲,核心参数与性能亮点极具颠覆性:硬核体量与载人设计:采用高强度合金打造机身,载人后整机重量约500公斤,机身中部设专属载人座舱,操作者坐入内置操控椅即可完成全流程操控,直立高度约为普通成年人的1.6倍,视觉冲击力拉满。
双模变形,全地形适配:核心突破是**双足/四足模式无缝切换**——双足模式适配城市街道行走、转弯,动作流畅自然;四足模式通过腿部折叠、重心调整实现,可爬楼梯、越斜坡,应对极端地形,甚至单腿发力踢倒砖墙。
电驱革命,替代传统液压:彻底摒弃笨重、易漏油的液压系统,采用自研高扭矩密度电机直驱,单关节峰值扭矩达90牛米,兼顾高爆发与轻量化,电驱系统成本较液压方案降低80%以上,且电机、减速器、控制器等核心部件100%国产化。
动态平衡,半吨级稳定控制:基于宇树成熟的动态平衡算法,将小型机器人的控制逻辑放大适配500公斤级机身,解决重型机甲防跌倒难题,变形过程丝滑衔接,发力时机身稳定无晃动。
二、金刚石增摩垫片:微米级“摩擦金刚”,重载机器人的潜在核心部件
金刚石增摩垫片是一种通过化学复合镀技术,在0.1-0.5mm弹簧钢基材表面镀覆含微米级金刚石颗粒的Ni-P镀层的精密工业部件,厚度仅十几微米、重量不足1克,看似轻薄,却能凭借“微观机械互锁”机制,成为高扭矩、高负荷场景的“性能倍增器”,目前已在工业机器人关节领域有成熟应用案例。1. 核心原理:从“表面摩擦”到“微观锚固”
传统钢质垫片静摩擦系数仅0.12-0.15,高扭矩下易发生微观滑移;而金刚石增摩垫片通过**金刚石颗粒半裸露设计**,在预紧力作用下,坚硬的金刚石颗粒嵌入配合面,形成数百万个微观锚点,将静摩擦系数提升至0.6-0.72(干摩擦工况),是传统垫片的4-5倍,临界滑移扭矩提升5.4倍,可有效解决高负荷下的滑移松动难题,这一特性与GD01的重载需求高度契合。2. 四大核心优势,适配GD01机甲潜在需求
超高扭矩传递,适配重载发力:GD01单关节90牛米的峰值扭矩,需关节螺栓与减速器连接处高效传递,若采用金刚石增摩垫片,理论上可将扭矩传递效率提升30%,杜绝“丢转”现象,确保机甲发力完整输出,进一步强化其硬核性能。
超薄轻量化,降低整机负载:机甲对重量极度敏感,每增加1克负载都会增加能耗、降低灵活性。金刚石增摩垫片厚度仅十几微米、重量不足1克,远薄于传统垫片,可在不增加机身负担的前提下提升连接性能,完美适配GD01的轻量化设计逻辑。
抗磨减震,保障动态稳定:GD01变形切换、行走发力时会产生剧烈振动,传统垫片易因微动磨损失效。金刚石增摩垫片的高硬度金刚石颗粒(硬度超80GPa,是传统合金的5倍以上)具备优异的抗磨损性能,同时弹性钢基可吸收振动能量,减少振动噪音,助力提升机甲动态平衡稳定性,延长关节部件寿命。
高可靠免维护,适应长期运行:镍磷涂层基体赋予垫片良好抗腐蚀性,金刚石的高硬度确保长期使用性能稳定,已有超2.5亿片应用实例无现场故障报告,若应用于GD01,可大幅降低其维护成本,满足民用场景长期稳定运行需求。
三、适配推演:金刚石增摩垫片如何赋能GD01机甲全场景性能
作为500公斤级载人机甲,GD01的关节、传动、连接部位是受力核心,从技术层面推演,金刚石增摩垫片可全面渗透这些关键位置,从细节处提升整机性能,成为机甲“力量与稳定”的潜在支撑。
1. 关节部位:助力动力输出精准可控
GD01的腿部、手臂、腰部关节是动力输出核心,电机扭矩需通过减速器传递至关节,带动肢体运动。若在关节螺栓与减速器连接处嵌入金刚石增摩垫片,可:增强扭矩传递效率,避免高扭矩下螺栓松动、减速器滑移,助力肢体发力精准,让双足行走更平稳、四足攀爬更有力;
抑制关节高速运动时的振动,减少位姿漂移,提升动态平衡控制精度,让500公斤级机身在变形、行走时更灵活稳定。